
序文
本文援用地址:http://www.eepw.com.cn/article/201610/308078.htm室内定位系统(Indoor Positioning System,IPS)是普适策画中的热切内容。跟着智能结尾的教训、迁徙互联网时间的降临,复杂室内环境下的定位与导航的需求日益增大,同期,IPS在全球安全、迁徙电子商务等限制齐有着凡俗的期骗。当今,IPS接管的定位时候主要包括RFID、Bluetooth、WiFi、UWB、ZigBee、光学、超声波、红外线、地磁场等。接管单一定位时候的室内定位系统齐存在一定的劣势,如包袱性强、彭胀性和鲁棒性差、定位精度低、响适时分长等。因此,多种定位时候和会是IPS的一个发展标的。
压力传感叹控时候(Force Based Touch Sereen Technology)zTouch来自于好意思国F—Origin公司。该时候的旨趣是在刚性面板的四把握际处竖立多个压力传感器,通过传感器感知用户在面板上触摸或作念手势产生的垂直于面板的压力,左证各点传感器受力不同进行定位。该时候具有环境鲁棒性好、合手久性强、无包袱性以及三维信息感知、定位精度高档优点,期骗于IPS可弥补其他定位时候的不及。当今,海外有多家机构正在连续基于该时候的定位系统,如英国兰卡斯特大学的Weight Lab、英国谢菲尔德哈勒姆大学和德国亚琛工业大学的Smart Floor等。
本文基于压力传感叹控时候联想了一种智能地板,并接管该地板构建了一袖珍定位系统。系统接管16个压力传感器和4块地板构建定位平台,达成对平台上指导小车的定位和旅途显现,并能通过LabVIEW软件和Android结尾巡视小车位置信息。
1 定位旨趣
压力传感叹控定位时候的基本单元由1块刚性面板和4个压力传感器组成,压力传感器散布于刚性面板的四角处,造成一四支点结构。四支点定位模子如图1所示。
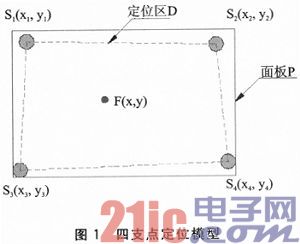
在图1所示的模子中,Si(i=1,2,3,4)示意第i个压力传感器。在P平面的二维坐标系中,记Si与P平面的斗殴点(或斗殴面的中心点)的坐标为(xi,yi),4个斗殴点组成的矩形区域(虚线框内)称为定位区D。在D中任少量(x,y)处施加一垂直于P平面的力F,令Fi示意Si受到的F的分压力,左证四支点平面物体要点位置策画公式,式(1)~(3)确立。

左证式(1)~(3),可策画出力F的位置,从而达成定位。
2 系统结构联想
2.1 系统联想
左证本连续的本质要求,构建了一个针对小车的定位演示系统。系统由定位平台、定位对象(小车)、数据相聚卡、PC机、Android监视结尾组成。当定位对象在定位平台上静止或指导时,通过分析传感器的数据策画出其在物理空间中的总共位置坐标(X,Y),该位置属性经过映射,反应在上位机位置贬责处事器(LabVIEW软件)的臆造舆图中。位置贬责处事器不错构建臆造场景,并可为迁徙结尾提供位置查询和导航的处事。定位系统组成如图2所示。
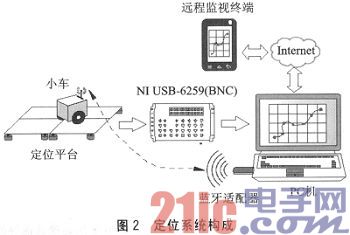
本系统接管USB-6259(BNC)相聚定位平台传感器的数据。USB-6259(BNC)是好意思国NI公司出产的一款高速、多功能M系列的数据相聚卡,提供有16路模拟输入通谈,其最高采样率为1.25 Ms/s,采样精度为16位,舒适系统要求。
定位系统可分为3个模块:
①定位显现模块。该模块达成在PC机端的LabVIEW平台下,及时显现小车在定位平台的总共位置及率判辨径。
②指导为止模块。该模块达成通过LabVIEW重要为止小车的指导,通过蓝牙传送为止教导,达到非斗殴迁徙小车的指标,同期忽闪斗殴式样产生的侧向力对定位精度的影响。
③良友监视模块。该模块达成通过Android手机良友监视小车的位置,PC机通过互联网向良友结尾播送小车的位置信息。
2.2 定位平台的竖立
皇冠注册定位平台由16个传感器和4块玻璃板组成,总面积为70×70 cm2,分为4个单元。传感器接管轮辐式压力传感器(型号为BK-4)。传感器自己集成有电桥,对外有4条引线,折柳为电源Vbg、GND、信号+和信号-。由于传感器输出的信号轻捷(μV~mV级),因此需要对信号进行放大。本系统接管的放大器为AD623。
为确保定位的准确,皇冠电脑版网址定位平台需要调平。当定位平台不服方,即当传感器高度不一致,在图1所示的四支点定位模子中可能会有1或2个支点处于不受力的悬空现象,即“虚腿”步地。“虚腿”步地将篡改四支点平台力的散布,从而不可期骗四支点公式求要点位置。周祖濂通过数学模子判辨注解了在四支点结构中的四个支点大略同期受力,即“虚腿”步地不错通过调平来幸免。
四支点平台的浅易调平继续接管向最高相沿逼近的规律,即通过垫片迁徙4个支点中高度较低的3个,使其与最高支点高度一致从而调平台面。本系统通过在传感器下垫纸片的规律调逍遥位平台。
3 系统软件联想
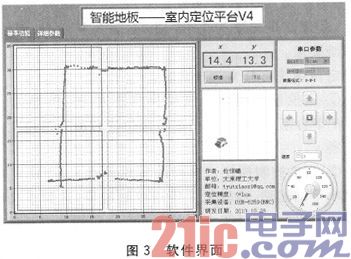
本系统上位机开拓平台接管NI公司推出的LabVIEW 2013。联想的软件界面如图3所示。
3.1 定位显现模块
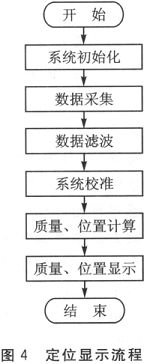
定位显现模块的输入为16个压力传感器的数据,经过滤波和策画,输出为定位平台上物体要点的位置。位置显现式样包括文本坐标和二维图片,旅途显现式样为XY图。定位显现过程如图4所示。
3.2 指导为止模块
指导为止模块是通过在PC机和小车间建设蓝牙通讯达成的。不具备蓝牙功能的PC机可通过蓝牙适配器和BlueSoleil软件达成蓝牙功能,小车端通过UART接口相连一蓝牙透传模块,此时,PC机端和小车端建设了臆造串口相连,LabVIEW端通过VISA串口通讯编程达成向小车发送指导教导。本模块可完成对小车的速率为止以及前进、后退、左转、右转、罢手5种指导现象为止。
3.3 良友监视模块
良友监视模块中,PC机为位置贬责处事器,Android结尾为客户机,汇集架构接管散布式Publisher-Subscriber相貌,PC机为总共注册的Android结尾提供位置查询处事。
良友监视模块接管了跨平台汇集通讯插件SCCT。SCCT(Smart PhoneCross-Plat-form Communication Toolkit,智高手机跨平台通讯包)是由T4SM(Tools for Smart Minds Software Solutions)公司研发的、支合手多种平台和编程谈话的开拓包,用于多种平台与LabVIEW平台之间进行数据通讯。SCCT支合手的操作系统包括Windows、Linux、iOS、Android、Phone7,支合手的编程谈话包括LabVIEW、Java、C、Object C、.NET和Javascript(HTML5)。本系统中,LabVIEW端接管SCCTPublisher Library提供的VI达成考证申请相连的订阅者身份、查抄相连现象、播送数据至总共行动现象的订阅者以及经受订阅者申请的功能,Android端接管SCCT Subscriber Library提供的API达成发送申请至发布者、经受数据并提交至界面进行显现等功能。
LabVIEW端信息发布重要框图如图5所示。Android端的软件架构如图6所示。
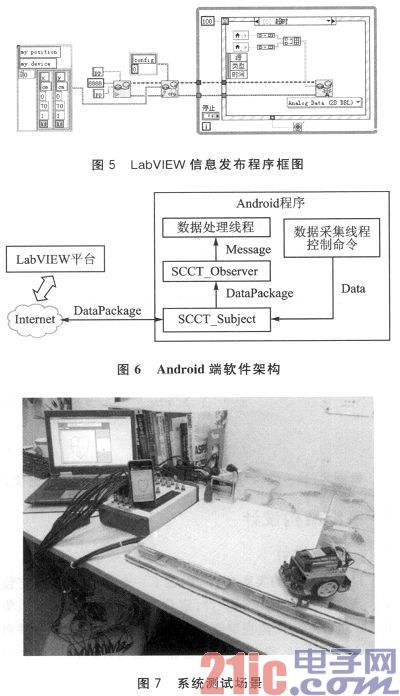
4 系统测试与效果分析

系统测试场景如图7所示。
皇冠客服飞机:@seo3687Android手机端良友监视界面如图8所示。
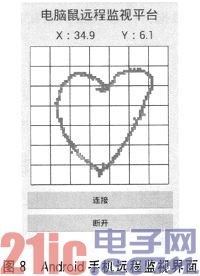
经测试,本系统达成了对小车的定位显现、指导为止和良友监视的功能。
在定位精度的测试中,在平台上画有位置参照网格,网格边长为1 cm。在定位平台上立时选取10个测试点,在每个点处施加压力,测量6次,记载软件策画出的坐标,并与本色网格坐标进行相比。在数据分析过程中,界说以下成见:
①偏差Xp、Yp。假定在物理平台上测试点的网格坐标取值鸿沟为X∈[a,b],Y∈[c,d](a、b、c、d为非负整数,b-a=d-c=1,单元为cm)通过软件求得的坐标为(x,y),界说偏差Xp、Yp:
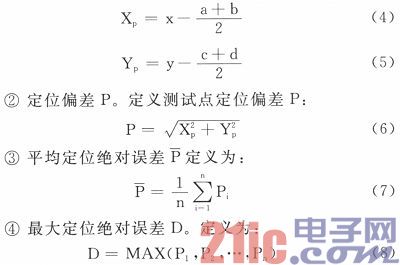
式中,MAX()为最大值;Pi为第i个测试点的定位偏差(cm)。
经测试,P=0.6 cm,D=1.8 cm。因此,单块智能地板的定位总共差错在2 cm内。在智能地板特质不变的前提下,由多块智能地板拼成的更大面积定位空间的定位总共差错也在2 cm内。
结语
本文联想了一种智能地板皇冠电脑版网址,并基于该地板构建了一个定位系统,达成了通过PC机LabVIEW软件和Android手机软件巡视智能地板上物体位置和率判辨径信息的功能。本定位系统最大定位总共差错在2 cm内,且具有环境鲁棒性好、无包袱性等优点,与其他定位时候结合,可弥补现存室内定位系统的不及。此外,本智能地板还可用于重点区域安防、隐秘保护下的监控等气象。